
(밑바닥부터 시작하는 딥러닝2) 5장. 순환 신경망(RNN)
지금까지 살펴본 신경망은 피드포워드라는 유형의 신경망이다. 피드포워드란 흐름이 단방향인 신경망을 말한다. 이 구조는 단점이 있는데, 바로 시계열 데이터를 잘 다루지...

(밑바닥부터 시작하는 딥러닝2) 4장. word2vec 속도 개선
3장에서는 word2vec의 구조를 배우고, CBOW 모델을 구현했다. 여기서 구현한 모델에는 몇 가지 문제가 있다. 말뭉치에 포함된 어휘수가 많아지면 계산량도 커진다는...

(밑바닥부터 시작하는 딥러닝2) 3장. word2vec
이번 장에서는 2장에서 알아본 ‘통계 기반 기법’보다 강력한 ‘추론 기반 기법’을 알아본다. 추론 기반 기법에서는 신경망을 이용하는데, 여기서 word2vec이 등장한다....
(밑바닥부터 시작하는 딥러닝2) 2장. 자연어와 단어의 분산 표현
자연어 처리란 사람들이 평소에 사용하는 말을 자연어라고 한다. 자연어 처리(NLP)는 사람의 말을 컴퓨터에게 이해시키기 위한 기술이다. 자연어 처리가 추구하는 목표는...

(밑바닥부터 시작하는 딥러닝2) 1장. 신경망
벡터와 행렬 import numpy as np x = np.array([1, 2, 3]) print(x.__class__) # numpy.ndarray print(x.shape) # (3, ) print(x.ndim) #...

Sequence to Sequence Learning with Neural Networks 리뷰
이 포스트는 Sequence to Sequence Learning with Neural Networks 논문에 대한 리뷰입니다. 부족한 지식으로 잘못된 내용이 있을 수 있습니다. Abstract...
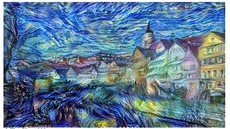
Style Transfer 구현
해당 포스트는 style transfer로 알려져 있는 Image Style Transfer Using Convolutional Neural Networks에 대한 구현입니다. 해당 코드는 tensorflow 홈페이지와 나동빈님의...

Image Style Transfer Using Convolutional Neural Networks 리뷰
이 포스트는 Image Style Transfer Using Convolutional Neural Networks 논문에 대한 리뷰입니다. Abstract 서로 다른 스타일의 이미지에서 의미있는 정보를 뽑는것은...
ResNet 구현 (For CIFAR dataset classification)
여기서는 Deep Residual Learning for Image Recognition의 CIFAR-10 데이터셋을 ResNet을 통해 학습하고, 평가하는 부분을 구현한다. 논문에 대한 자세한 사항은 ResNet...
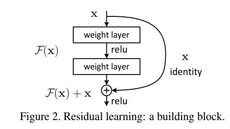
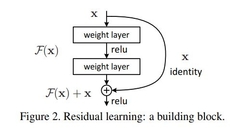
Deep Residual Learning for Image Recognition(ResNet) 리뷰
이 포스트는 ResNet으로 알려져있는 Deep Residual Learning for Image Recognition에 대한 리뷰입니다. 논문은 해당 링크를 참고하세요. Abstract 깊은 신경망일수록 훈련시키기가...

(시작하세요! 텐서플로 2.0 프로그래밍) 10장. 강화학습(Reinforcement Learning)
강화학습은 실수와 보상을 통해 배우는 알고리즘이다. 신경망이 정답과 예측 사이의 오차를 역전파해서 의미있는 가중치와 편향을 학습하는 것처럼 강화학습은 좋은 선택과...

(시작하세요! 텐서플로 2.0 프로그래밍) 9장. 오토인코더(AutoEncoder)
인코더와 디코더, 잠재변수 오토인코더(AutoEncoder)는 자기 자신을 재생성하는 네트워크이다. 오토인코더는 크게 인코더, 잠재변수, 디코더로 나눌 수 있다. 인코더는 지금까지 컨볼루션 신경망에서...
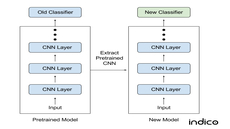
(시작하세요! 텐서플로 2.0 프로그래밍) 8장. 사전 훈련된 모델 다루기(전이 학습)
좋은 성능을 보이는 네트워크는 수백개의 레이어를 쌓은 경우가 대부분이고, 레이어가 늘어남에 따라 네트워크를 훈련시키는 데 걸리는 시간도 증가한다. 다행히 연구자들은...
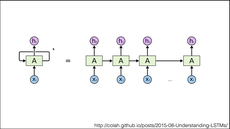
(시작하세요! 텐서플로 2.0 프로그래밍) 7장. 순환 신경망(RNN)
순환 신경망의 구조 RNN은 일반적인 신경망과 유사하지만 되먹임 구조를 가지고 있다는 차이점이 있다. RNN을 통해 할 수 있는 것들 이미지를...
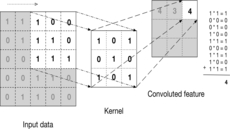
(시작하세요! 텐서플로 2.0 프로그래밍) 6장. 컨볼루션 신경망(CNN)
특징 추출 앞장에서 배운 보스턴 주택 가격 데이터셋에는 주택의 가격을 예측하기 위한 주택당 방의 수, 재산세율, 범죄율 같은 특징(feature)들이 있었다....
(시작하세요! 텐서플로 2.0 프로그래밍) 5장. 분류(Classification)
이항 분류 이항분류는 정답의 범주가 두 개인 분류 문제이다. 여기서는 와인의 당도, 산도, 알코올 도수 등의 데이터를 통해 레드인지 화이트와인인지...
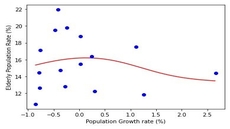
(시작하세요! 텐서플로 2.0 프로그래밍) 4장. 회귀(Regression)
선형 회귀 선형회귀(Linear Regression)는 데이터의 경향성을 가장 잘 설명하는 하나의 직선을 예측하는 것이다. 데이터 준비 아래 코드는 지역의 인구 증가율과...
(시작하세요! 텐서플로 2.0 프로그래밍) 3장. 텐서플로 2.0 시작하기
기본적으로 코드들은 코랩에서 실행한다. 텐서플로 2.x 버전 가져오기 try: %tensorflow_version 2.x except Exception: pass import tensorflow as tf print(tf.__version__) #...
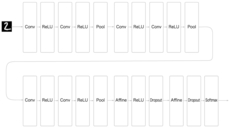
(밑바닥부터 시작하는 딥러닝) 8장. 딥러닝
조금 더 깊은 신경망 다음 그림과 같은 조금 더 깊은 CNN을 만들어보고, MNIST데이터셋에 적용해본다. 네트워크 특징 3*3의 작은 필터를 사용한...

(밑바닥부터 시작하는 딥러닝) 7장. 합성곱 신경망(CNN)
합성곱 신경망은 이미지 인식 분야에서 주로 쓰인다. 완전연결 계층은 평탄화하여 데이터 형상이 무시되는데 CNN은 이를 보완해준다. 지역적인 부분에 대해서 특징을...
PRML 2021 1일차, Recent Advances in Autoregressive models a...
이 글은 정보과학회에서 진행하는 PRML 2021의 첫 번째 세션인 김세훈님의 Recent Advances in Autoregressive models and VAE에 대한 포스트이다. introduction...
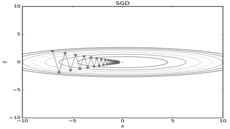
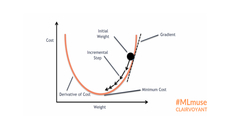
(밑바닥부터 시작하는 딥러닝) 6장. 학습 관련 기술들
매개변수 갱신 신경망 학습의 목적은 손실 함수의 값을 가능한 낮추는 매개변수를 찾는 것이고, 이를 최적화(optimization)이라고 한다. 확률적 경사 하강법(SGD) 5장에서...
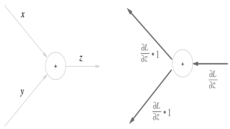
(밑바닥부터 시작하는 딥러닝) 5장. 오차역전파법
수치 미분은 간단하지만 계산 시간이 오래 걸린다는 단점이 있다. 이러한 단점을 오차역전파법(backpropagation)을 통해 해결할 수 있었다. 계산 그래프 노드: 연산을...
(밑바닥부터 시작하는 딥러닝) 4장. 신경망 학습
패러다임의 변화 학습이란 훈련 데이터로부터 가중치 매개변수의 최적값을 자동으로 획득하는 것을 뜻한다. 기계학습은 데이터에서 패턴을 발견하여 학습한다. 이미지에서 ‘5’라는 숫자를...
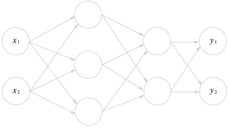
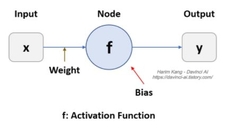
(밑바닥부터 시작하는 딥러닝) 3장. 신경망
활성화함수 활성화 함수는(activation function)은 입력 신호의 총합을 출력신호로 변환하는 함수를 의미한다. 계단함수 시그모이드 함수 Relu Leaky-Relu Code def step_function(x): #...
(밑바닥부터 시작하는 딥러닝) 2장. 퍼셉트론
퍼셉트론 퍼셉트론은 다수의 신호를 입력으로 받아 하나의 신호를 출력하는 것을 말한다. 입력신호인 x1과 x2를 넣으면 가중치인 w1과 w2에 각각 곱해진...

Motion Planning Among Dynamic, Decision-Making Agents wit...
본 포스트는 Motion Planning Among Dynamic, Decision-Making Agents with Deep Reinforcement Learning의 리뷰이다. Abstact 로봇에서 사람들 사이를 부딪히지 않으면서 안전하고,...

Smart Patrolling An Efficient Road Surface Monitoring Usi...
이 글은 Smart Patrolling: An Efficient Road Surface Monitoring Using Smartphone Sensors and Crowdsourcing 논문의 리뷰이다. introduction road surface monitoring기술은...
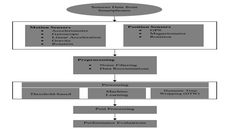
Road Surface Monitoring Using Smartphone Sensors:A_Review
이글은 Road Surface Monitoring Using Smartphone Sensors: A Review를 정리한 포스트이다. 도로 표면을 모니터링하는 것은 부드럽고, 안전한 도로 시설을 위해...

스타트업 행사 2020 넥스트라이즈를 다녀와서...
NextRise는 벤처, 스타트업의 투자유치 및 대,중견기업과의 사업협력을 지원하는 스타트업 행사이다. 컨텐츠로는 대,중견기업과의 1대1 밋업, 부스전시, 온라인, 오프라인 강연들로 구성이 되어있다....
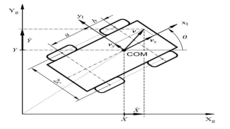
Modeling of 4Wheel Skid Steering Mobile Robot
이글은 4wheel skid steering mobile robot의 물리적 모델링에 관한 포스트이다. 4wheel skid steering mobile robot(SSMR)은 robust한 환경에서도 잘 견딜 수...

The Challenge of Supporting AV at Scale 리뷰
이 포스트는 The Challenge of Supporting AV at Scale에 대한 리뷰이다. The Challenge of Supporting AV at Scale 인텔에 한화...

How Starship Delivery Robots know where they are going Re...
이 포스트는 배달 로봇 회사 스타쉽 테크놀로지의 포스트인 How Starship Delivery Robots know where they are going의 리뷰이다. How Starship...

Starship Technology CTO Post Review
라스트마일 모빌리티 업체 스타쉽 테크놀로지의 CTO가 4년간의 경험을 공유한 포스트를 전달하고자 한다. 스타쉽의 CTO의 입장에서 글을 전달해보도록 하겠다. 4년간의 여행에서...

How Neural Networks Power Robots at Starship Review
스타쉽이 어떻게 적은 computational resources와 lidar와 같은 비싼 센서를 쓰지 않으면서 실시간으로 잘 주행할 수 있을까? Using machine learning to...

Learning to Fly by Crashing 논문 리뷰
논문: Learning to Fly by Crashing 목적 적은 비용으로 indoor 환경에서 드론이 장애물과 부딪히지 않는 자율주행 학습 선행연구 localization 및...